Ok, this is REALLY a strange one. I live in the US/Orlando, and the map on my EDGE 1030, which shows where "north" is (1 o'clock in the screenshow below), is always the same as CIQ's view of North. I added a black DOT on my little Weather Compass to show where CIQ thinks North is in relation to my current heading on my bike.
DIRECTION[BEARING] = myInfo.currentHeading;
It is easy to calculate North in relation to currentHeading.
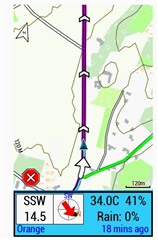
But one of the users of my Data Field (he is located in France, about 20km from the Weather Station Orange) has noticed that at times, CIQ's view of North is wrong. This screenshot is from him. Garmin's map says North is at the 1 o'clock position, but CIQ thinks North is at the 4 o'clock position.
I've never see this disconnect in/around Florida. And Pierre only sees this happen occasionally.
I added labels to help diag this. The wind is coming from SSW, the bike is heading toward SW. So there is a 14.5 k/hr headwind about 45 degs from the front/left. The DOT shows that North behind and to the right. But this is wrong as you can see in the map view.
Any thoughts on what might be going on? I can't replicate that here. All I can do is trust currentHeading()?