
I've recorded info.currentHeading during a running activity with a F5. The following chart shows the heading for a straight part of my running course in degrees

E.g. the heading direction changes suddenly from 100deg at time=48s to 302deg at time=51s, i.e. from ~E to ~NW. This is nearly the opposite direction.
I understand that heading may swing somewhat. But as the chart shows it swings at a magnitude which means that the running direction changes randomly from forward to backward almost every few sec.
I've now tested all possible compass settings and calibrated the compass many times, but the oscillation remains stable.
If I interrupt the running an walk the oscillation decreases as can be seen in this chart e.g. between time 1:43:20 and 1:45:00
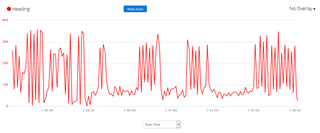
This seems to indicate that the oscillation depends on the movement of the arm/watch during running.
Furthermore I've also observed that the compass is orientation dependent. If the watch face points to the sky the compass shows a plausible North direction. If I rotate the watch so that it's watch face points to the bottom, the North and South directions are exchanged.
See also for Cycling using Edge 830
Can anyone explain to me what is going on there?
Fenix 5, SW 20.00
GPS 2.60
CIQ 3.1.8
SDK version 3.1.9




