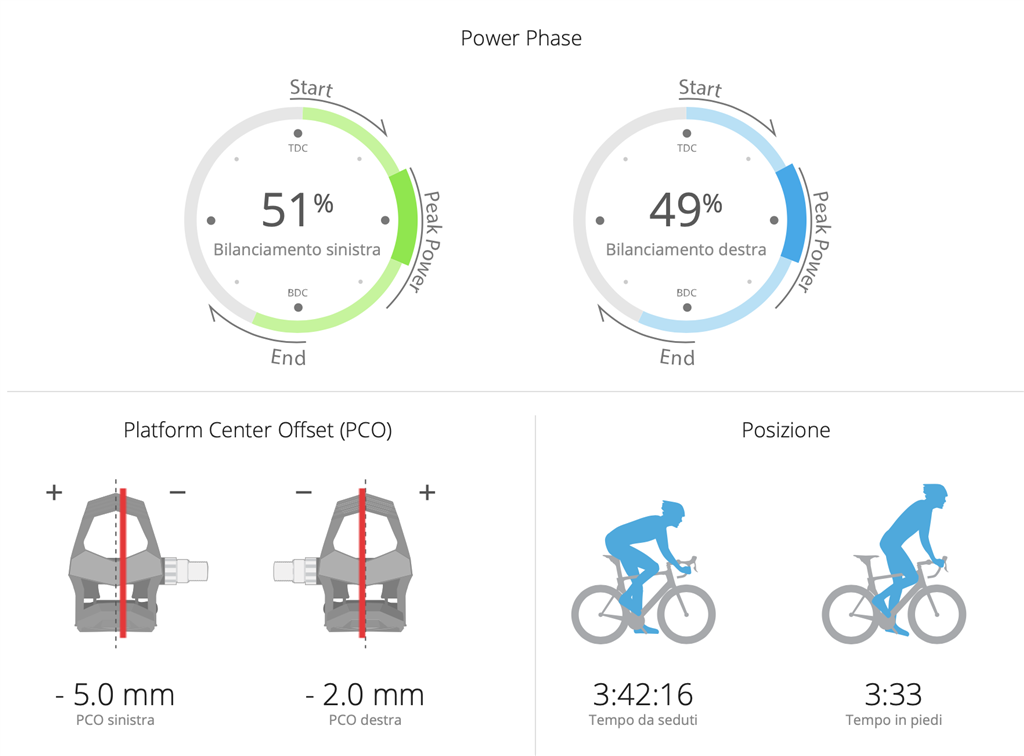
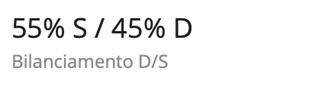
My Right/Left balance from NEO 2T are very different from one leg to the other. Where Vector 3 give me a result of 51/49, the Tacx 2T NEO give me a result of 55/45.
Any suggestion?
My Right/Left balance from NEO 2T are very different from one leg to the other. Where Vector 3 give me a result of 51/49, the Tacx 2T NEO give me a result of 55/45.
Any suggestion?
If GARMIN VECTOR 3 (not 3S) was calibrated, it's ALWAYS MORE ACCURATE than any trainer because Vector 3 collects data directly from each pedal (Neo collects power data only from cassete moving and cal…
Ok but... right/left balance I have to ignore it, ant+ for speed/cadence sensor I have to disable it. Neo 2T it's a 1200 euro device and I have to accept to ignore some of its features? I can't believe…