
What to the red-circled length measurements represent in the 66i (ver 9.20) screenshot below? One of the length measurements must be the calculated horizontal accuracy. Which one? And what is the other one?
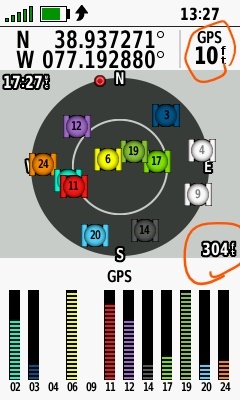
What to the red-circled length measurements represent in the 66i (ver 9.20) screenshot below? One of the length measurements must be the calculated horizontal accuracy. Which one? And what is the other one?
there is no such thing as accuracy for a portable gps receiver alone. there is precission.
I would definitely side with Garmin on this one, the facts don’t lie.
Here’s a quick but controlled test I did today over a 6.7 hour period in what I would class as a low to mild multipath environment.
The control point used for the test has been surveyed with geodetic equipment 10 times individually to within a positional uncertainty of 1.2cm to 1.4cm. The resulting coordinates of those 10 x 24 hour observations fell within a 5mm diameter circle of precision. The equipment used was a Trimble R7 GNSS model 2 and Zephyr Geodetic Model 2, with the observations processed through the GeoScience Australia AUSPOS processing service. So the confidence of the control point is very high as true point. A sample extract from one of the test reports was posted previously.
For the test, the 66i was mounted centrally and vertically over this point. It was configured for both GPS & Galileo, and track logging at 30 seconds intervals. It is noted there is a minor offset of the external antenna housing on the device body.
At the beginning, and at the end of the test, the 66i was reporting an estimated 3.0m accuracy. The reported estimation was not checked during the test to avoid disrupting the logging.
Results:
A total of 807 points were logged, with 100% falling well within the estimated accuracy of 3m of the true point.
767 or 95% of the logged points fell within a 2.2m radius of the true point.
The centroid (average) of the logged points was 10.4cm from the control true point.

If anyone would like to present factual test results supporting any of the other opinions expressed here I’d like to see them.
there is no such thing as accuracy for a portable gps receiver alone. there is precission
In case you missed it in the plot above.

in fact the last 4 simple plots are nice and tell exactly what it is all about. Finally simple picture explaining the difference between accuracy and precision. Like it much.
I think all who want know the difference will definitely understand it from those 4 simple picts.
Particularly the top right pic demonstrates the problem. If the device does not know where the cross point of the two lines is (how should it know?) then there is no statement of accuracy at all, only thing we can resolve is the precision.
The only time we can talk about accuracy is when we know where the cross point in the center is. Otherwise accuracy does not exist.
You just confirm all I did tell before.
In the experiment above, there was chosen point and this was agreed on as reference. The exact value was obtained by statistics on large number of measurements, more different devices possibly using different ways of measuring time differences and all was processed by a more controlled manner as no other suitable reference could be provided. By that, a real reference was created, not based on simple measurement, but high degree of statistics. This is quite fine reference point, even it is 'selfmade', but due to absence of any other proper standard, this is more then perfect.
In some of the linked txt there was something talking about a vessel navigating, but then stated that gps receiver is not able to have accuracy in real time. This is absolutely correct.
It can not do it in real time, but it can do it by collecting lot of data, applying statistics to them and decide that this is my reference.
The simple measurement without any previous calibration could then be compared against this quite fine reference. This results in accuracy statement, no doubt.
The same is not possible, if the previously created reference point is not existing. Then no accuracy exists. Only precision can be deducted.
Important to know: without this previously agreed on and well defined reference, no accuracy at all would exist, as accuracy means only comparing with known value.
In fact, just slightly less exact the experiment would work when all done by the 66i itself, then the blue point could be the reference with only small error. Let say take one 66i, use it for collecting 1000 results over some time, define this as your calibration normal, and then just approach this point with other 66i and use the results, then again we could have real accuracy.
Without this reference point, neither the red nor blue one, we have no accuracy information at all as we can not compare anything.
Other examples:
I have a thermometer in my room, it shows 27.0dgeC now. It is written on it: accuracy +/- 0.2 degree. This is complete nonsense as there can not be any accuracy of thermometer alone. If there would be an other thermometer with known traceable calibration to some standard, then I could say if my thermometer is accurate or not.
I have here a Fluke meter on my desk. In the manual it states that it is accuracy is +/- 0.005 deg .This is not true, even if it is written by Fluke. In the exam for avionics license, there were question like this, asking if I have a meter saying its accuracy is +/- 0.01 Volt, what does it mean when it displays 12.57V?
The correct answer to it is: meaningless. Not allowed to use this kind of instrument unless it was calibrated against known and traceable standard within defined period of time. Giving other answer would lead to fail the exam.
Suggest you look again at the the two illustrations of accuracy on the left, and then look closely again at the test plot.
They match, the 66i has just proven conclusively it is accurate. There is no doubt.
Every single one of the 807 individual points it recorded was confirmed in the test well within it's stated accuracy of the true location where it said it was.
If there had only been one point, any one, it met it's estimated accuracy. They all did.
Time to move on.
so far none of the picts or described test shows anything about accuracy without a reference.
I did search all the text and picts, sorry , can not find it event with magnifier glass.
All it shows measurement against a *previously defined standard.*
Only thing I can see, is comparison between selfmade, but high quality reference point. In such case the result is accuracy related to the standard (the red point)
Without the reference point present, let say in front of my house, no accuracy exist by definition of accuracy.
Accuracy is a term comparing measured value against known value as reference.There can not be any discussion about it as this is the basic term of any measurement.
As there is no 'red point' in front of my house, there is no way my gps can give any infos about its accuracy.
A gps receiver has by definition of term accuracy no accuracy at all.
As basically no other measuring instruments have, unless the measured values can be compared to a standard.
Again:
comparing with a reference or standard: accuracy statement can be obtained
not comparing to a reference or standard, or absence thereof: no accuracy statement can be obtained
This post by Jordan249, along with the uncertainties listed in the links is a good summary of why the uncertainty on the 66i satellite page is meaningless unless you know which of the many uncertainties go into the quantity. Even "radius" is equiovocal.
The concept of "truth" in the post is a bit philosophical. There may be some recognized benchmark location on the Earth's surface. I don't know. But coordinates for all other locations are estimates. Even if you're standing on a USGS benchmark, that "benchmark" is an estimate. You can talk about truth as a metaphysical concept like God, Zeus and fairies. But if it exists, it's not something we know about in the empirical world. The closest thing we know in the material world to a "true" location is the mean or expected value of all the best measurements.
Wombo24 earlier used a target image to illustrate accuracy. While technically correct, it lends itself to confusion in this discussion. A target is a benchmark. It is axiomatically true, meaning it's true because we just agree to assume it's true. In other words, it's not the result of a measurement.
This test is interesting, Wambo24. You say you did not check the 66i satellite page uncertainty during the test. Did you check it at the start and end? Your posts suggests it as 3m. Is that correct? If you have time, it would be interesting to repeat the same test in a way that would cause the indicated uncertainty to be greater. Maybe with a steel bucket over the device to weaken the signal strength.
Maybe with a steel bucket over the device to weaken the signal strength.
Confirming that the 66i was estimating 3.0m both at both the start of the test, and again at the end of the test. I’m thinking that on 66i (at least with my V9.00 and GPS 2.81) it maxes out at 3.0m as I haven’t seen it lower.
I’ll pass on the bucket test; the intention was only to confirm the estimated accuracy. There are NGS survey marks all around you so you could do it there yourself. Go for the highest order (lower number). https://geodesy.noaa.gov/NGSDataExplorer/
In lieu of a bucket someone else closer might be able to loan a tin foil hat.
Be aware of multipath as it's by far the most significant issue to data quality and accuracy. If you push heavily into multipath or other such unnatural acts any device or methodology is going to struggle to deal with it so the results will not likely be that meaningful.
To get that in perspective, even the touted messiah differential is not immune, multipath is pervasive and even professional grade differential is subject to the same uncertainties. For example, earlier posts claimed that it was only differential and tractors using RTK with local base station methods that were accurate because they had a known point and this is not necessarily the case. Industry leader Trimble challenges that idea with this: “The drawback is that the data quality of this station strongly influences the rover performance, i.e. the multipath effect of this station is 100% transferred to the rover positioning.”
Source document here: https://positioningservices.trimble.com/wp-content/uploads/2019/02/Trimble_WhitePaper_Trimble-RTX-a-New-Approach-for-Network-RTK.pdf
And this is only referring to the effect of the base station, the rover or autonomous device is also impacted on it's own even in differential so the reality is that everything suffers from these unknowns, it's only the extent that varies.
So for any experiments you do inside the hat, take it as it comes. For any standard testing try and pick a survey mark as far away from trees and buildings that you can. You appear to have quite a few there.
Thanks, Wombo24.
I realize much of the discussion here, including your test, is focused on the accuracy of the 66i. However, my original question was about the meaning of the uncertainty length shown on the Satellite page. Not whether it is correct at the minimum value.
I also asked Garmin support. I just wanted to know what variables are used in the calculation, what was the calculated uncertainty of the uncertainty and whether the uncertainty radius on the page was planar or spatial. I was told the answers were proprietary, which was mildly insulting. Really, whether the uncertainty radius is spatial or planar is proprietary? I would have preferred that support simply said it didn't have access to the answer.
Since no one here knows and Garmin isn't saying, my question will probably be forever unanswered. But even so, I've learned a lot of interesting stuff from the people who've posted to this thread. So I appreciate the interest in my question.
By the way, Wambo24, calculating the surface difference between two sets of coordinates is fairly complicated. Briefly, what did you use to product the scatter plot you posted?
